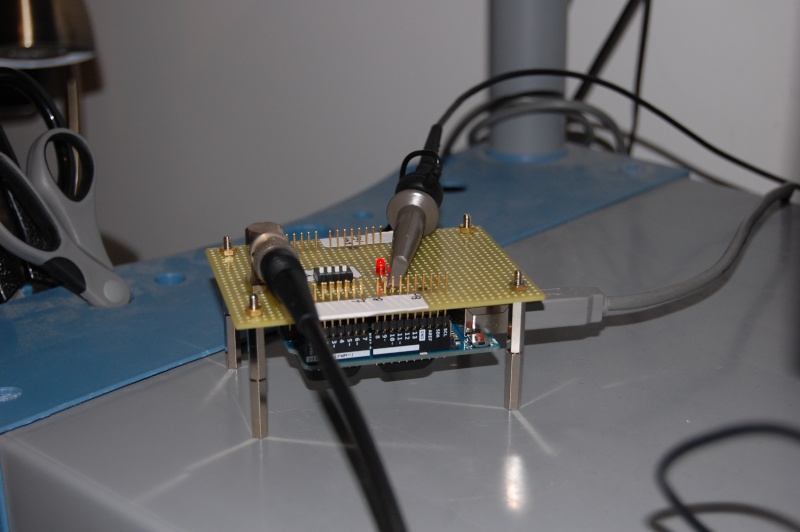
Je ne sais pas pourquoi, mais je tenterais bien un essai de ton programme sur mon banc de test 

Vous aimez votre mz, vous êtes cool et vous aimez partager : ce forum est fait pour vous

 Re: Projet 2014/2015 : allumage cartographique IGNIMZ compatible rupteur et capteur mz
Re: Projet 2014/2015 : allumage cartographique IGNIMZ compatible rupteur et capteur mz franck Mer 5 Nov 2014 - 17:50



 Re: Projet 2014/2015 : allumage cartographique IGNIMZ compatible rupteur et capteur mz
Re: Projet 2014/2015 : allumage cartographique IGNIMZ compatible rupteur et capteur mz niallof Mer 5 Nov 2014 - 18:02

 Re: Projet 2014/2015 : allumage cartographique IGNIMZ compatible rupteur et capteur mz
Re: Projet 2014/2015 : allumage cartographique IGNIMZ compatible rupteur et capteur mz franck Mer 5 Nov 2014 - 20:26
 Re: Projet 2014/2015 : allumage cartographique IGNIMZ compatible rupteur et capteur mz
Re: Projet 2014/2015 : allumage cartographique IGNIMZ compatible rupteur et capteur mz niallof Mer 5 Nov 2014 - 21:08
 Re: Projet 2014/2015 : allumage cartographique IGNIMZ compatible rupteur et capteur mz
Re: Projet 2014/2015 : allumage cartographique IGNIMZ compatible rupteur et capteur mz niallof Mer 5 Nov 2014 - 21:40
Re: Projet 2014/2015 : allumage cartographique IGNIMZ compatible rupteur et capteur mz franck Jeu 6 Nov 2014 - 5:45
Re: Projet 2014/2015 : allumage cartographique IGNIMZ compatible rupteur et capteur mz niallof Jeu 6 Nov 2014 - 9:09
Re: Projet 2014/2015 : allumage cartographique IGNIMZ compatible rupteur et capteur mz niallof Jeu 6 Nov 2014 - 13:48
 Re: Projet 2014/2015 : allumage cartographique IGNIMZ compatible rupteur et capteur mz
Re: Projet 2014/2015 : allumage cartographique IGNIMZ compatible rupteur et capteur mz franck Jeu 6 Nov 2014 - 18:35
Re: Projet 2014/2015 : allumage cartographique IGNIMZ compatible rupteur et capteur mz franck Ven 7 Nov 2014 - 21:13
 Re: Projet 2014/2015 : allumage cartographique IGNIMZ compatible rupteur et capteur mz
Re: Projet 2014/2015 : allumage cartographique IGNIMZ compatible rupteur et capteur mz franck Dim 9 Nov 2014 - 12:03

 Re: Projet 2014/2015 : allumage cartographique IGNIMZ compatible rupteur et capteur mz
Re: Projet 2014/2015 : allumage cartographique IGNIMZ compatible rupteur et capteur mz niallof Dim 9 Nov 2014 - 16:52
Re: Projet 2014/2015 : allumage cartographique IGNIMZ compatible rupteur et capteur mz franck Dim 9 Nov 2014 - 17:24
niallof a écrit: je t'avais conseillé d'utiliser les switchs pour l'adressage de tes points. après, tu peux ne faire d'une lecture lors de l'init comme tu le suggérais. par contre même si cela colle pour les protocourbes, je ne suis pas sur que les ordonnées des courbes réelles puissent être "multipliées" pour passer de l'une à l'autre.
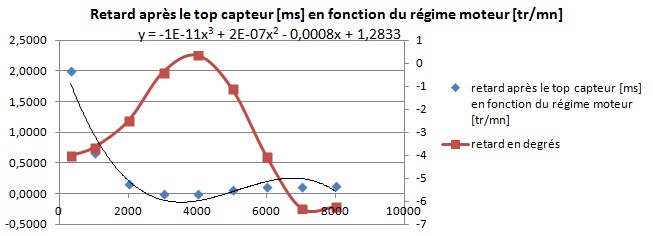
une polynomiale?
Re: Projet 2014/2015 : allumage cartographique IGNIMZ compatible rupteur et capteur mz niallof Dim 9 Nov 2014 - 20:38

 Re: Projet 2014/2015 : allumage cartographique IGNIMZ compatible rupteur et capteur mz
Re: Projet 2014/2015 : allumage cartographique IGNIMZ compatible rupteur et capteur mz Invité Dim 9 Nov 2014 - 20:47
 Re: Projet 2014/2015 : allumage cartographique IGNIMZ compatible rupteur et capteur mz
Re: Projet 2014/2015 : allumage cartographique IGNIMZ compatible rupteur et capteur mz niallof Dim 9 Nov 2014 - 21:11
Re: Projet 2014/2015 : allumage cartographique IGNIMZ compatible rupteur et capteur mz Invité Mar 11 Nov 2014 - 4:05




 Re: Projet 2014/2015 : allumage cartographique IGNIMZ compatible rupteur et capteur mz
Re: Projet 2014/2015 : allumage cartographique IGNIMZ compatible rupteur et capteur mz franck Mar 11 Nov 2014 - 10:08
Re: Projet 2014/2015 : allumage cartographique IGNIMZ compatible rupteur et capteur mz niallof Mar 11 Nov 2014 - 19:28

 Re: Projet 2014/2015 : allumage cartographique IGNIMZ compatible rupteur et capteur mz
Re: Projet 2014/2015 : allumage cartographique IGNIMZ compatible rupteur et capteur mz franck Mar 11 Nov 2014 - 19:48
Re: Projet 2014/2015 : allumage cartographique IGNIMZ compatible rupteur et capteur mz niallof Mar 11 Nov 2014 - 20:45
Re: Projet 2014/2015 : allumage cartographique IGNIMZ compatible rupteur et capteur mz franck Mar 11 Nov 2014 - 21:30
 Re: Projet 2014/2015 : allumage cartographique IGNIMZ compatible rupteur et capteur mz
Re: Projet 2014/2015 : allumage cartographique IGNIMZ compatible rupteur et capteur mz franck Ven 14 Nov 2014 - 7:24
 Re: Projet 2014/2015 : allumage cartographique IGNIMZ compatible rupteur et capteur mz
Re: Projet 2014/2015 : allumage cartographique IGNIMZ compatible rupteur et capteur mz franck Dim 16 Nov 2014 - 18:16

 Re: Projet 2014/2015 : allumage cartographique IGNIMZ compatible rupteur et capteur mz
Re: Projet 2014/2015 : allumage cartographique IGNIMZ compatible rupteur et capteur mz niallof Mar 18 Nov 2014 - 18:31
Re: Projet 2014/2015 : allumage cartographique IGNIMZ compatible rupteur et capteur mz Contenu sponsorisé
» Italemmezeta et autres MZ italiennes
» Belles photos
» MZ en Hongrie
» Leboncoin 2024 et autres
» Bourse à Saintes
» Les MZ c'est pas du cinéma !
» L' Avenir de nos véhicules de collection en Zone urbaine. Très important
» MZ en musique